Глава 25. регулирование объемного гидропривода
Глава 25. РЕГУЛИРОВАНИЕ ОБЪЕМНОГО ГИДРОПРИВОДА
3.32. Объемное регулирование
В качестве регулируемых насосов и гидромоторов получили распространенно роторво-поршнеьые и пластинчатые гидромапганы, описанные выше.
Введем в рассмотрение безразмерный параметр е регулирования гидромапганы, равный отношению текущего значения рабочего объема V'„ к максимальному его значению F0, т. е. е = V'JV0.
Регулирование изменением рабочего объема насоса (см. рис. 3.91) заключается в плавном изменении скорости движения выходного звена гидродввгателя путем изменения параметра ея. Минимальное его значение соответствует минимальному рабочему объему насоса и, следовательно, минимальной скорости выходного звена. Максимальная скорость последнего получается при ен = 1, т. е. при V'№ = V#a.
При закрытом предохрапитсльпом клапане скорость выходного звена гидропривода определяется размерами машин, их объемными ¦* КПД и изменяется пропорционально параметру регулирования ен, т. е. для гидропривода поступательного движения в соответствии с формулой (3.78)
Vu = ett(V0jSa) инг|0,
(3.82)
для гидропривода вращательного движения в соответствии с выражением (3.79)
(3.83)
пг—еп (Vnu/Vor) «1,г]о,
где объемный КПД гидропривода г)0 = 'По.н'По.р является линейно убывающей функцией давления в системе, т. е. нагрузки на выходном звене. Кроме того, объемный К11Д несколько уменьшается с уменьшением параметра ев, так как расход утечек мало зависит от рабочего объема, но этот расход относится к идеальной подаче насоса, убывающей с уменьшением параметра еа.
Таким образом, при постоянном ея и увеличении нагрузки па выходном звено гидродвпгателя скорость этого звена несколько убывает из-за влияния утечек в насосе и гпдродвигателе. Одпако ввпду того что объемные КПД современных гидромашин достаточно высоки, это уменьшение скорости выходного звена невелико.
При установке нескольких значений ея — const нагрузочные характеристики гидропривода, т. е. зависимости v„ от F для поступательного движения поршня гидроцилиндра или пг от Мг Для вращательного движения вала гидромотора имеют вид, показанный на рис. 3.94 (область ОЕВС).
При некотором предельном значении нагрузки (максимальном давлении в системе) срабатывает предохранительный клапан или автомат изменения рабочего объема насоса и скорость выходного звена круто уменьшается до пуля (ветвь ВС), так как происходит торможение гидродвигателя под нагрузкой.
Нагруаочпые характеристики показывают так называемую просадку гидропривода, т. е. спижепио скорости выходного эвепа, обусловленное пагрузкой.
При использовании гидромотора полная просадка гидропривода при закрытом предохранительном клапане равна отношению частот
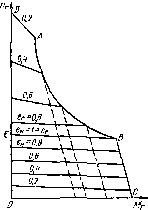
Рис. 3.94. Нагрузочные характеристики регулируемого гыдропри-
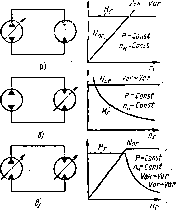
Рнс. 3.05. Варианты объемного регулирования гилропрввода:
о — регулирование лвсоса; б — регу.тироаа* лис гидроиотора; в — регулировании одсосй и гидромотора
следовательно,
На эту величину при значительных давлениях ощутимо влияет сжимаемость жидкости. Поэтому точнее еР n = eiIer,
где s„ — коэффициент подати насоса (см. п. 3.1); ег — коэффициент испольас-иаиии расхода гидромотором (ef = QuelQi).
Сжимаемость рабочей жидкости увеличивает просадку гидропривода и тем больше, чем выше давление.
Мощность, развиваемая гидроприводом при постоянном давлении в системе возрастает при регулировании (увеличении рабочего объема) пасоса. Скорость выходного звена при этом возрастает, а усилие на гагоке гидроцвлявдра или момент на валу гидромотора остаются постоянными (рис. 3.95, я).
Реверс гидродвигателя, т. е. изменепие нанравлепня движения выходного звена гидропривода при регулируемом насосе, можно осуществить двумя способами: с помощью гядрораспределителей (см. рис. 3.91) или изменением направления содачи (реверсом подачи насоса). Второй способ возможен лишь в гидроприводах с замкнутой циркуляцией жидкости и осуществляется сначала уменьшением рабочего объема васоса до нуля, а затем изменением знака эксцентриситета в шиберных и радиальных роторно-поршневых насосах или изменением знака угла отклонения диска (блока) р в аксиальных роторно-поршневых насосах. При переходе через пулевой рабочий объем приходится проходить зону нечувствительности, на границах которой гидромотор останавливается, так как вся подача насоса идет на компенсацию утечек. Внутри этой зоны «елос ул снослбек компенсировать утечки. Поэтому вместе с частотой вращения гидромотора давление в гидроприводе постепенно уменьшается до пуля. На рис. 3.96 показана зависимость частоты вращения гидромотора яг от параметра е„ при р = 0 (прямая а) и при р — const (кривая Ъ), а также зона нечувствительности с.
Регулирование изменением рабочего объема гидромотора возможно лишь в гидроприводах вращательною движения. Если насос работает при постоянных частоте вращения и давлении, то регулирование гидропривода осуществляется про постоянной мощности пасоса (рис. 3.95, б).
При уменьшении рабочего объема Уог гидромотора от максимального его значения (йг = 1) до минимального (ег = (,rn,iti) частота вращения его вала пе будет увеличиваться. Крутящий момент Мг на валу гидромотора ввиду примерного постоянства развиваемой мощности, равной NnT == Д/гсог, будет убывать приблизительно обратно пропорционально ь>г, т. е. по гиперболическому закону. Вследствие переменпости КПД гидромотора действительный зацон изменения Mr будет несколько отличаться от гиперболического.
При таком регулировании частота вращения гидромотора
пг— Fon^uTio, ni1o.r/(<?rF<jr)- (3.84)
При уменьшении рабочего объема гидромотора и увеличении момента Мг (давлении рг) объемный КПД гидропривода г|0 «= т|0 „г|о.г уменьшается. Поэтому нагрузочные характеристики гидропривода в данном случае (область ABED на рис. 3.94) изображаются линиями, наклон которых в сторону оси абсцисс с -уменьшенном параметра ег увеличивается. Кривая АВ ограничивает область возможных режимов работы, определяемую настройкой предохранительного клапана.
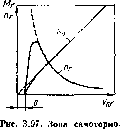
Как следует из формулы (3.84), при ег -*• 0 частота вращения гидромотора стремится к бесконечности. Допускать слишком малые значения рабочего объема гидромотора нельзя. При этом возникает сначала неустойчивая работа, а затем и самоюрможсиие гидромотора. Момент Мт, развиваемый гвдромотором, при V'№ = а (см. рис. 3.97) становится равным моменту трения внутри его механизма и последний останавливается даже при отсутствии нагрузки.
Чаще всего регулирование с помощью гидромотора применяется в системах, где регулируемым также является и насос.
Регулирование изменением рабочих объемов насоса я гидромотора
(рис. 3.95, в) осуществляется с целью расширения диапазона регулирования гидропривода. Регулирование выполняется последовательно. Если требуется постепенно увеличить скорость вращения вала гидромотора до пГтях (например, при трогании с места и разгоне транспортного средства), то регулирование выполняется в следующем порядке: 1) насос устанавливают в положение нулевого рабочего объема, а гидромотор — в положение максимального, приводящий двигатель выводят на заданную постоянную частоту вращения; 2) рабочий объем насоса постепенно увеличивают до максимума, вследствие чего скорость выходного авепа возрастает до значения, соответствующего номинальной мощности привода; 3) увеличивают скорость выходного звена уменьшением рабочего объема гидромотора до минимального значения, определяемого началом неустойчивой работы.
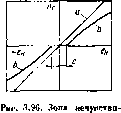
тельиоети гидромотора ape жения гидрометра
реверсе подвод пасоса
Первый этап разгона происходит при постоянном моменте М? и возрастающей мощности привода. Для второго характерно уменьшение крутящего момента и постоянная мощность.
При аакрытых клапанах в общем случае объемного регулирования из равенства Qn = QP получаем
пс = [(ев^онМ^'ег)] «нЛо. пГ)о, г- (3.85)
КПД объемного гидропривода с объемным регулированием определяют так же, как и в случае нерегулируемого привода, формулой
(3.80). В отличие от нерегулируемого гидропривода КПД гидрома-шип помимо давления, частоты вращения и вязкости существенно зависят еще и от параметров регулирования ев и ег. Максимальный КПД гидропривода имеет место в области максимальных рабочих объемов насоса в гидромотора, т. е. при еп = ег = 1,
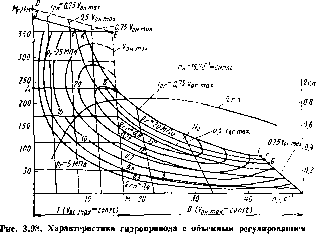
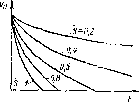
Экспериментальные характеристики регулируемого объемного гидропривода обычно изображают в виде ряда кривых зависимости момента М, па валу гидромотора от частоты его вращения иг. Их строят для нескольких постоянных значений давления рг, используемого гидромотором (рис. 3.98). Прямая ME отделяет область I регулирования пасоса (слева) от области II регулирования гидромотора (справа).
Кривые Мг = / (пг) при рг = const в I области представляют собой горизонтальные прямые, а во Я — спадающие кривые, близкие к гиперболам.
На том же графике нанесены наклонные прямые зависимости Мг от пг при постоянных значениях рабочего объема или, что то же, при еа — const и ег — const. Эти прямые представляют нагрузочпые характеристики гидропривода, которые были показаны на рис. 3.94. Их наклон характеризует уменьшение частоты вращения выходного вала гидропривода (просадку) с возрастанием давления рг из-за утечек и сжимаемости жидкости.
Для любой точки I и II области характеристики гидропривода могут быть подсчитаны значения КПД гидропривода
Г|г. л — МгО)г/(Ма(йа).
По отям значениям на поле момептных характеристик наносят кривые постоянных значений КПД. Эти кривые определяют области наиболее радиоиальпой эксплуатации гидропривода. Таким образом получают топографическую характеристику гидропривода, аналогичную такой же характеристике (см. рис. 3.22) роторного насоса. На ней лииия ABC соответствует оптимальному давлению рп — = 20 МПа.
Для согласования гидропривода (гидропередачи) с приводящим двигателем помимо моментных характеристик при р — const и У0 = const целесообразно иметь па графике еще крпрые Мг = / (гсг), соотве’твующие постоянным значениям развиваемой мощности. Они представляют собой гиперболы. На рис. 3.98 одна из этих гипербол FG, обозначенная также Лг0> наплучшим образом проходит через область максимальных КПД. Следовательно, эта кривая соответствует оптимальной для данной гидропередачи мощности. Соответствующая ей кривая КПД i)rj, гидропривода также нанесена на графике.
Гипербола KL отделяет область предельных режимов эксплуатации гидропривода при данной настройке предохранительного клапана. Точка К соответствует началу открытия клапана (р — 30 МПа), а линия KJ — характеристике клапана. В точке J вся подача насоса идет через предохранительный клапан. Линии, показанные штрихами, при дайной настройке клапана реализовать нельзя.
3.33. Дроссельное регулнровавие гидропривода при последовательном включении дросселя
Принцип дроссельного регулирования заключается в том, что часть подачи нерегулируемого насоса отводится через дроссель или клапан на слив, минуя гидродвигатель.
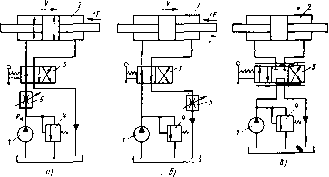
Рис. 3.99. Схема гидроприводов с дроссельным регулированием:
и —• дроссель па входе; б — дроссель на еыхоле, в — дросселирование в распределителе на «ходе и выводи
При дроссельном регулировании возможны два принципиально разных способа включения регулирующего дросселя: последовательно с гидродвигателем и параллельно гидродвигателю,
Последовательное включение регулирующего дросселя может быть осуществлено в трех вариантах: дроссель включен на входе в гидродвигатель, на выходе из него и на входе и выходе одновременно (рис. 3.99). В схемах насос 1 нерегулируемый, гидродиигатель-гидроцилиндр 2 с двустороппим штоком, распределитель 3 двух-пояициоштый на схемах а и б и трехпоэнционный на схеме в. Клапан 4 в данном случае является переливным. Дросселем 5 (или дроссели-рующди распределителем на схеме в) молодо регупв^оваль скорость перемещения поршня.
При полном открытий дросселя скорость поршня получается максимальной. При уменьшении открытия давление перед дросселем повышается, клипан приоткрывается и пропускает часть подачи пасоса. Скорость i?„ поршня при этом уменьшается. При полном закрытии дросселя вся подача насоса направляется через клапан па слив в бак, а скорость поршня равна нулю. При постоянном открытии дросселя и увеличении преодолеваемой нагрузки, т. е. силы F, давление насоса возрастает, расход через клапан увеличивается, а скорость поршня уменьшается.
Найдем зависимость между скоростью г?Г1 поршня и нагрузкой F, пренебрегая всеми гидравлическими сопротивлениями кроме дросселя (или окон дросселирующего распределителя).
Vn — Q/Su,
где <? — раехоа жицкпсш чореа гщфопидавдр, paasura рзлхвда дрмльлъ
в-вдв-^дрУИрГй^, (8.8»)
здесь ^ — коэффициент расхода; 5др — площадь проходного отверстия дросселя; рДр — перепад давления на дросселе:
Рщ>=Рн~Ра* (3.87)
где рц — перепад давления в гидроцилиядре, оиределяеиый нагрузкой а площадью поршня:
pa-Wu. (3.88)
Sa — аффективная площадь поршня.
Гидродвигатель, например, гидроцилиндр при расчете гидропривода можпо рассматривать как особое местное гидравлическое сопротивление, вызывающее потерю давления рц. Выражая vB с учетом формул (3.86)—(3.88) будем иметь
Уя = Ц (SW}SB) V(2/р) [рв - (F/Sa)]. (3.89)
Скорость v„ при этом не зависит от того, расположен ли дроссель на входе в гидродвигатель или на выходе из него.
Для симметричного дросселирующего золотникового распределителя и для гидроцклиндра с двусторонним штоком расходы в рабочих окнах и перепады давления в них одинаковы, поэтому для перепада давления на золотнике и va будем иметь
Aftip.e = 0,5 (рн — рц),
Vn — Пир. а (^др. а/^п) У (Ря — F/Sn)/p. (3.90)
Следовательно, при одинаковых нагрузках F и скоростях vn У 2 М^ДР — Идр. з*^др. 31
а при ц,ар = Цдр з ]/2 Л'др = 5ДР_ а, т. е. площадь каждого пз рабочих окон дросселирующего золотпнка в У2 раз больше площади, отверстия дросселя.
Как видно из формул (3.89) и (З.УО), зависимость i?„ = / (-F). т. е. нагрузочная характеристика гидропривода, при одновременном дросселировании на входе и выходе такая же, как и при одном дросселе на входе или выходе, и изображается спадающой параболой (рве. 3.100), каждая из парабол соответствует своей степени открытия дросселя S = 5др/5дЛтах-
Скорость выходного звена при ее регулировании последовательно включенпым дросселем иропорциокалм х S и ее максимальное значение получается при 5 = 1. Максимальная нагрузка fma*, пря которой выходное звено тормозится (уп = 0), от степени открытия дросселя не зависит.
Нагрузочные xs- Рне. 3.101. Схемы работы гитова гвдроци-рактеристики гидропривода днндра:
&
ц’>а
В отношении потерь давления и КПД, при регулировании последовательно включенным дросселем, безразлично, где производится дросселирование потока: на входе в гидродвигатеяь, па выходе или на входе и выходе одновременно. Однако дросселирование потока, на выходе имеет своп преимущества. При этом гидродви^тель работает более устойчиво, особенно при знакопеременной нагрузке. Имеется возможность регулирования гидропривода при отрицательных нагрузках, т. е. при направлении преодолеваемой силы F в сторону перемещения поршня. Кроме того, при установке дросселя в сливной гидролинии тепло, выделяющееся при дросселировании потока Жидкости, отводится в бак без пагрева гидродвигателя, как это имееу место в схеме с дросселем иа входе. D результате гидродвигатель работает в более благоприятных условиях.
При использовании в качестве гидродвягателя гндроцилиндра с односторонним Д1Г0К0.Ч следует иметь в виду, что расход жидкости Q в напорной линии не равен расходу Q' в сливной линии, так как эффективная площадь поршня с одной стороны меньше, чем с другой, на площадь сечения штока. При этом возможны следующие два случаи (рис. 3.101): 1) шток работает на сжатие (толкающий шток) a Q’ < Q', 2) шток работает на растяжение (тянущий шток) и Q’ > Q.
3.34. КПД гидропривода при последовательной включении дросселя
При дроссельном регулировании и любом случав включения дросселя полный КПД гидропривода определяется как потерями энергии в насосе и гидродвигагсле, так и потерями, обусловленными процессом управления. Ввиду этого целесообразно ввести понятие КПД процесса управ ения у|и у, который представляет собой отпошепие мощности потока Nv — pvQr, затраченной в гидродвигателе, к мощности потока Nn_K — РнСн, подаваемого насосом, т. е. Пп.? = PvQuKPvQn). (3.91)
Велнчипа у|п у оценивает потери мощпости на регулирование скорости выходного звена гидропривода (им же можно учитывать и потери давления в соединительных трубопроводах).
Полный КПД гидропривода г)г.н равеп произведению КПД насоса на КПД процесса управления п на КПД гидродвигателя. Например, ври использовании гидроцилипдра
= 1Л.-Л- (3.92)
Допустим, что потери в насосе, гвдродвигателе и трубопроводах отсутствуют (г)я = г|г = 1). Тогда полный КПД гидропривода т|р а = 1|п у. Для анализа КПД т|п_у применим безразмерные величины, т. о. величины, отнесенные к максимально возможным их значениям, а именно (применительно к гидроцилиндру):
относительную нагрузку, равную относительному перепаду давления на гидроцилиндре,
Pv = Рт/Ри = F/(pBSn) =F IF max = F;
относительную скорость поршня, равную относительному расходу, подводимому к гидроцилиндру,
va = Ua/V„ шаз — VaSn/fa пшх^п) = Qr/QB = ?г;
относительную площадь проходного отверстия дросселя (степень открытия дросселя)
S=SatiSmBax.
Величиной рв — F определяется доля давления рв насоса, используемая в гидродвигателе, а величиной i>n = QB — доля подачи насоса, направляемой в гидродвигатель.
Из формулы (3.92) следует, что
1° •»°
"= w ° ^
<3'93)
Скорость у,|тях найдем из формулы (3.89), положив в ней F = О и 5ДР - Ядр тл:
Уп max — Ц (i др 1ги^У*5о) У/ 2ря/р» (3.94)
Полагая, что коэффициент расхода ц дросселя ее зависит от степени его открытия, определим относительную скорость поршня
й. = 0л/0пшж“ SVl-F=sVl-pr=Q,. (3.95)
Отсюда
F = pr= l-ifc/5». (3.96)
Теперь на оспованид выражения (3.93) дгожно получать коэффициент т)пу в двух вариавтах:
i)a,v=$prVl-p,-, (3.97)
г|п у = уд (1 — vl/S2). (3.98)
Из формул ясно, что максимальный КПД т|п.у получается при
S = 1, т. е. При полпом открытии дросселя. Оптимальные значения va и рг находят исследованием на максимум.
Например, продифференцируем выражение (3.98) при S = 1 по i;n и приравняем производную пулю:
rfrin. y/dvn = 1 — Зуд = 0.
Отсюда оптимальная скорость Vn. опт = Qt. опт = WT = 0,58, а максимальный КПД
Ч,.,»,-(1 - l/3)/K3= (2/3)/КЗ = 0,385.
Из формулы (3.96) следует, что относительная нагрузка при этом Рг. опт=^опт =2/3. „
Те же результаты можно было бы получить дифференцированием формулы (3.97) по рт.
Таким образом, даже при КПД пасоса и гидродвигателя, равных единице, КПД регулируемого гидропривода с последовательным включением дросселя не может быть больше 0,385. Это значение, как следует из предыдущего, получается как произведение
Tin. у так = ^г. оитРт. опт = 0,58 -0,666 = 0,385.
Столь низкое значение КПД т]а_у объясняется тем, что даже на оптимальном режиме работы гидропривода только 58 % подачи насоса направляется в гидродвигатеяь (остальное идет через клапан) и лишь 2/3 давления насоса используется в гидродвигателе (остальное теряется в дросселе), т. е. потери мощности происходят одновременно и в дросселе и в клапане.
Зависимости КПД процесса управления от относительной скорости и относительной нагрузки, достроенные по формулам (3.97) и (3.98) для ряда постоянных значений степени открытия
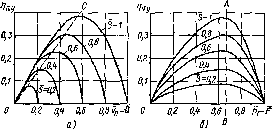
Рис. 3.102. Зависимость КПД процесса управления: .
в—от относительной скорости поршни; 6—ог относительной нагрузки
дросселя, показаны на рис. 3.102. Следует иметь в виду, что общий ,.КПД гидропривода будет еще ниже аа счет потерь мощности в насосе и глдродвигателс.
3.35. Дроссельное регулирование гидропривода ?ри параллельной включении дросселя
Иа рис. 3.103 дапа схема объемного гидропривода при включении регулирующего дросселя параллельно гпдроднигателю. В топке М поток рабочей жидкости разветвляется; один иоток череа распределитель 2 палранляечея в гидроцилиндр 1, а другой — в регулирующий дроссель 3. Клапан 4 в данном случае является предохранительным. Он открывается лишь при чрезмерном повышении давления в системе.
Скорость Va выходного звена — штока гидроцшшндра — регулируется изменением степени открытия дросселя. Чем она меньше, тем большая доля иодачи насоса направляется в гидроцилиидр и том больше скорость уп- При полном закрытии дросселя скорость va наибольшая. При полном открытии дросселя скорость поршня уменьшается до пуля или до минимального значения в зависимости от нагрузки F.
Для параллельного включения дросселя, предполагая, что потери давления в распределителе и гидролнпиях отсутствуют, имеем
Qu = Qr + Qap! Ря = fr ^ Рт = F/'‘Ч-
Второе уравнение записано на основапии равенства потерь давления ь параллельных трубопроводах.
Скорость поршня:
va — Q-JS*- (Qu-Qnj>)/Sa;
расход через дроссель
(?др = И^др ]/"'р Рт ~ И'^др У j— •
После подстановки в предыдущее уравнение получим
Уп ='5^'(^в — И‘5в:руГ^-'^')- (3 99)
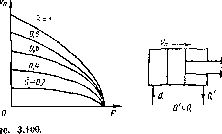
На рис. 3.104 показаны нагрузочные характеристики гидропривода про его регулировании параллельно включеппым дросселсч, построенные по формуле (3.99) для ряда постоянных зпачепий 2> = = 5дТ)/5дРН1ах.

Рис. 3,103. Схема гидропривода с дроссельным регулированием ври параллельном включения дросселя
Рас. 3.104. Нагрузочные характеристики гидропривода при параллельном включении дросселя
В отлизие от характеристик при последовательном включении дросселя, они имеют противоположную кривизну и выходят из одной точки, соответствующей unmai и F = 0. Нагрузка вызы
вающая торможение выходного звена, уменьшается с увеличением степени открытия дросселя и при 5 -н>- 0 Fmах-* со. При нар^ллельпом включении исключается возможность регулирования ярн направлении преодолеваемой силы вдоль штока в Сторону его перемещения.
КПД гидропривода при параллельном включении дросселя определяется иак же, как и при последовательном включении формулой (3.92), а при допущении, что tih = tir = 1, °п равеп КПД процесса управления „ = т\п Последний определяется формулой (3.91), т. е. для гидроцилиндра ГКу = Рсп-М?г,
где для рассматриваемого случая pP=*F = prIp»= 1.
Следовательно, при параллельном включении дросселя, в ог-личие от поражений (3.97) и (3,98), имеем tih y = Ua = (3.100)
Таким образом, в данном случае КПД rin_y процесса управления однозначно определяется относительным расходом жидкости черев дроссель или, что тоже, степенью открытия дросселя Tin,y=I— 5.
3.36. Сравнепяе способов регулирования гидроприводов
Сравнение различных способов регулирования гидропривода, рассмотренных выше: двух вариантов дроссольного и объем цого, целесообразно провести по трем показателям: по нагрузочным характеристикам, КПД и стоимости применяемых гидром&пшп и аппаратуры.
Ь
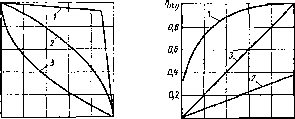
Рис. 3.106. Сравнение способов регулирования по КПД процесса управления {обозначения те же, что н на рис. 3.105)
0,8
0,6
о,г
О 0,2 0,4 0,5 0,8 F Рис. 3.105. Сравнение гвдропрн* волок оо нагрузочным характе-рнстнкам при регулировании:
1 — объемной; 2 — дроссельном с последовательным ыипочеавем дросселя; $ — дроссельном с параллельным включением дросселя
Нагрузочная характеристика гидропривода характеризует степень стабильности скорости выходного звена (штока, вала) при изменяющейся нагрузке. Обычно требуется возможно большая стабильность, т. е. наименьшая просадка гидропривода.
На рис. 3.105 показаны нагрузочные кривые, т. е. зависимости скорости уп выходного звена от нагрузки F на нем, построенные при ностояппых значениях рабочих объемов гидромашип при объемном регулировании и неизменных степенях открытия регулирующих Дросселей прп дроссельном регулировании, а также при одинаковых значениях максимальной скорости и тормозящей нагрузки.
Наибольшей стабильностью обладает гидропривод с объемным регулированием (кривая 1). Значительно хуже в этом отношении дроссельное регулирование с последовательным включением дросселя (кривая 2) и еще хуже дроссельное регулирование с параллельным включением дросселя (кривая 3).
Сравнение способов регулировании по КПД сначала выполтт в предположении, что КПД гидромашин — пасоса и гидродвигателя — равны единице и, следовательно, КПД гидропривода rir п — = Tin.у Затем будем считать, что при последовательном включении дросселя нагрузка оптимальна, т. е. рт = F = 2/3. Тогда из формулы (3.97) получаем
rjn. у = 25/(3 УЗ) =0,3855.
Но из формулы (3.95) следует, что при рт = 2/3 скорость va пропорциональна S, поэтому
(Vn/Vn тах)оиг = 5др/5др таг: ИЛИ 1>д = 5,
где и'п — отношение скорости поршня к максимальной его скорости при той нее оптимальной нагрузке.
Подставляя в предыдущее, получаем rin, у = 0,385^.
Двум полученным выражениям для т]П у соответствуют прямые АВ на рис. 3.102, 6 и ОС на рис. 3.102, а.
Линейная зависимость т]п. у от 1>п для дроссельного регулирования при оптимальной нагрузке показана па рис. 3.106 (линия 2).
Для параллельного включения дросселя оптимальный режим гидропривода совпадает с режимом vn mas, следовательно, vn = v'a и в соответствии с формулой (3.100) имеем т]„ у = i%. Этому равенству отвечает прямая 3.
Для объемного регулирования будем считать, что г)н = г|г = 1 лишь на режиме максимальных рабочих объемов. Но учтем падение КПД при уменьшении этих объемов. Рассмотрим случай, когда регулирование скорости поршня производится изменением рабочего объема насоса. Тогда при vn = ynmas КПД гидропривода’ бу,|}ет равен единице, но при уменьшении vn он будет уменьшаться по закону, приближенно описываемому кривой 1.
Наиболее высокий КПД гидропривода получается при объемном регулировании, ниже — при дроссельном с параллельным включением дросселя и еще ниже при дроссельном с последовательным включением дросселя.
Следовательно, по двум важнейшим показателям — нагрузочным характеристикам и КПД — лучшие качества имеет гидропривод с объемным регулированием. Однако при выборе способа регулирования гидропривода необходимо учитывать еще экономические показатели.
Регулируемые гидромапганы — насосы и гидромоторы — более дорогостоящие, чем нерегулируемые. Поэтому используя регулируемый гидропривод идут на значительные капитальные затраты, но зато благодаря более высокому КПД получают экономию в эксплуатационных расходах, т. е. в стоимости энергозатрат. Ввиду этого, объемное регулирование гидропривода обычно применяют, когда существенными являются энергетические показатели, например, для гидроприводов большой мощности и с длительными режимами их работы. Гидронрпводы с дроссельным регулированием и дешевыми, например, шестеренными насосами используют обычно в маломощных системах, а также, когда режимы работы гидропривода кратковременные.
3.37. Стабилизация в синхронизация движения выходных звеньев
Очень часто в гидроприводах металлорежущих станков и других машин примепяют дроссельное регулирование устройством для стабилизации скорости выходного звена, т. е. для улучшения нагрузочных характеристик. Таким устройством служит регулятор потока, обеспечивающий стабильность установленной скорости независимо от изменения нагрузки.
регулаторон потока
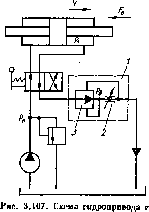
На рпс. 3.107 иоказапа схема гидропривода поступательного движения с регулятором потока, уста» новлешшм последовательно на выходе из гидроцилиндра. Регулятор 1 состоит из регулируемого дросселя 2 и редукционного клапана S. Последний поддерживает постоянное давление рл при входе в дроссель. На выходе из дросселя при малом сопротивлении отводящей гидролинии давление можно считать постоянным и равным атмосферному.
Поэтому и расход жидкости че-реа дроссель будет постоянным, Подача жидкости в гидродвигатель Qp = QB — Qnp при неизменной подаче насоса постоянна и ие зависит от нагрузки, по&тому постоянной будет и скорость выходного эвена. В действительности скорость ип с увеличением нагрузки несколько уменьшается из-за влияния утечек в пасосе, возрастающих с увеличением давления, а также из-за неточности работы редукционного клапана. Нагрузочная характеристика гидропривода с регулятором потока имеет примерно такой же вид, как и с объемным регулированием (линия 1 на рис. 3.105). Крутой спад скорости вблизи тормозной нагрузки обусловлеп открытием предохранительного клаиана.
Гидропривод с постоянной выходной частотой вращения при
переменной частою вращения вала насоса и переменной нагрузке на валу гидромотора называют стабилизированным.
Стабилизация выходной частоты вращения обычпо осуществляется по сигналу центробежного или электрогидравлического регу-400 лятора, воздействующего через усилительное звено иа мехапизм изменения рабочего объема насоса. Гидромотор в такой схеме обычно нерегулируемый.
Схема простейшего гидропривода для стабилизации частоты вращения электрогенератора переменного тока стабильной частоты с центробежным регулятором скорости приведена на рис. 3.108. Гидропривод состоит из насоса 5, соединенного с приводящим двигателем, н гидромотора 6, вал 7 которого соединен с электрогенератором и приводит во вращение центробежный регулятор 1, который перемещает при изменении частоты вращения гидромотора 6 золотник 2 распределителя системы управления. Последний, подавай жидкость в гидроцилиндр 3 механизма регулирования (угла наклона диска 4) насоса 5, восстанавливает рассогласование, иоддерживая выходную частоту вращения гидромотора постоянной.
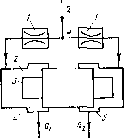
Рис, 3.108. Схема гидропривода с во- Рис. 3.109. Схема делителя стояввой частотой вращения на выходе потока
Когда от одного насоса приводится в действие два или более гидродвигателей, бывает необходимо обеспечить одинаковые Скорости их выходных звеньев, несмотря на некоторое рвеличие нагрузок. Такая потребность, например, возникает в гидроприводе грузоподъемной машины, в которой груз должен подниматься несколькими параллельно соединенными гидроцилиндрамн без перекосов.
Синхронизация движения гидродвигатслей осуществляется с помощью так называемого делителя потока (рис. 3.109), принцип дей ствия которого основан на дросселировании. В точке М поток разветвляется на два, каждый из которых проходит через постоянный дроссель 1, а затем подводится к гильзе 2 с плавающим поршнем S. Последний играет роль клаиана, перемещаясь в ту или другую сто-роиу в зависимости от действующей иа него разности давлений. Разность давлений возникает, когда вследствие разных нагруэок расход жидкости в одной ветви отличен от расхода в другой и, следовательно, потеря давления в одном дросселе больше, чем в другом. Перемещаясь в сторону меньшего давления, например, вправо, пор-шепь 3 уменьшает площадь отверстия 5 и увеличивает площадь отверстия 4. Поршень остановится тогда, когда давления в правой а левой полостях гильзы, а следовательно, и расходы через ахи полости будут одинаковыми.
Г л а в а 26. СЛЕДЯЩИЕ ГИДРОПРИВОДЫ (гидроусилители)
3.38. Принцип действия и области применении
Следящим называется регулируемый гидропривод, в которой скорость движения выходного звена изменяется по определенному закону в зависимости от задающего воздействия на звено управления. Выходное звено — это обычно шток гидроцилйндра или вал гидромотора, а звено управления — устройство, на которое подается управляющий сигнал.
В большинстве случаев использования следящего гидропривода к функциям слежения добавляются также функции усиления управляющего сигнала по мощности, поэтому следящий гидропривод часто называют гидроусилителем. Следящий гидропривод применяют в тех случаях, когда непосредственное ручное управление той или иной машиной является для человека непосильным (на самолетах, кораблях, тяжелых автомобилях и тракторах, строительно-дорожных и других машинах, а также в системах гидроавтоматики металлорежущих станков).
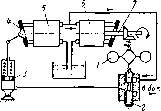
Схема простейшего следящего гидропривода поперечной подачи суппорта копировальпого токарного станка показана на рпс. 3.110. Суппорт 5 объединен с выходным звеном гидропривода — подвижным корпусом 4 гидроцилипдра, в котором размещено также звено управления — золотниковый гидрораспределитель 9, Поршень 7 гидроцилипдра закреплен па корпусе 6 суппорта. Про продольной подаче суппорта щуп 2 скользит по копиру 3 и смещает гидрораспределитель, который открывает доступ жидкости из подводящей гидро-линии 1 в большую полость 8 гндроцилиндра. Это вызывает смещение корпуса 4 с закрепленным па нем резцом, повторяющее смещение гидрораспределителя. При этом щель, соединявшая полость 8 с подводом 1 перекрывается, чем осуществляется прямая обратная связь выходного и задающего звеньев. Она восстанавливает равновесие в системе после исполнения управляющего сигнала. Непрерывное протекание процессов рассогласования и восстановления представляет слежение выходного звена за командой задающего.
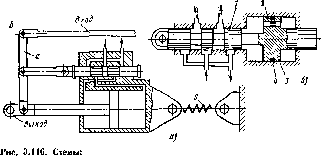
Схема широко распространенного гидроусилителя с рычажной связью между звеньями показана на рис. 3.111. В нем выходному звену, штоку 6, сообщаются движения, согласованные с определенной точностью с перемещением звена управления, тяги 2, при требуемом усилении входной мощности.
Для обеспечения слежения выходного эвена 6 за перемещением звена управления 2 обычпо применяют отрицательную обратную связь, передающую движения выходного звена на звено управления для уменьшения управляющего сигнала. Действие этой связи сводится к тому, что движение звена управления в сторону открытия рвсходвых окон распределителя 5 вызывает движение выходного звена, направленное ua их закрытие.
Обратная связь в схеме, представленной на рис. 3.111, осуществляется с помощью дифференциального рычага 7, охватывающего распределитель (звено управления) 5 и поршепь гидродвигателя 3 со штоком 6 (выходное звено). При перемещении тяги 2, связанной с ручкой управления, перемещается точка 1 дифференциального рычага 7, с которым связаны штоки силового цилиндра 4 и распределителя 5. Так как силы, противодействующие смещению золотника распределителя, несравненно меньше соответствующих сил, действующих в системе силового поршня 3, точку 6 штока можно рассматривать в пачале движения тяги 2 как неподвижную, ввиду
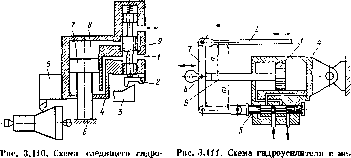
привода копировального стайка ханичсской обратной связью
чего перемещение тяги вызовет через рычаг 7 смещение золотника распределителя 5. В результате при смещении его из нейтрального положения на величину, превышающую перекрытие (m — I)/2 (рис. 3.66, а), жидкость поступит в соответствующую полость цилиндра 4, что вызовет перемещение поршня 3 (а следовательно, и движение точкл 8 выходного звена 6) на некоторое расстояние, пропорциональное перемещению тяги 2.
Если движение тяги 2 прекратится, продолжающий перемещаться поршень 3 сообщит через рычаг 7 золотнику распределителя 5 перемещение, противоположное тому, которое он получал до этого при смещении тяги 2. При атом расходные окна распределителя будут в результате обратного движения его плунжера постепенно прикрываться, скорость поршня 3 будет уменьшаться до тех пор, пока золотник но придет в положение, при котором окна распределителя полностью перекроются и движение поршня прекратится. При смещении золотника распределителя в противоположную сторону движение всех элементов регулирующего устройства происходит в обратном направлении.
В действительности отдельных (ступенчатых) этапов движения управляющего и выходного звеньев рассматриваемого следящего привода не существует, а оба движения протекают почти одновременно, т. е. имеется не ступенчатое, а непрерывное «слежение» исполнительным механизмом за перемещением звена управления. После того как выходной сигнал, переданный через обратную связь, становится равным управляющему сигналу, питание гидродвягателя прекращается.
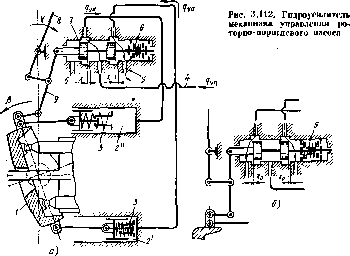
Примером использования такого гидроусилителя может служить показанный на рис. 3.112, а механизм управления для отклонения люльки в крупных регулируемых роторно-поршневых насосах. Гидроусилитель питается по линии 4 от вспомогательного насоса, встроенного в корпус основного насоса. Отклонение и удерживание люльки 1 в отклоненном положении производится поршнями гидро-цилпндров 2'- и 2". При отклонении внешнего рычага 8 управления золотник 7 смещается из среднего положения на ход х и открывает доступ жидкости из линии 4 в один из гидроцилиндров, а другой в то же время соединяет с областью слива 5. Так как люлька 1 связана с золотником 7 и рычагом 8 управления двуплечим рычагом 9 обратной связи, наполнение цилиндра будет происходить гюлько при условии, что скорость смещения золотника, вызываемого поворотом рычага 8, больше скорости смещения, вызываемого отклонением люльки 1. Если рычаг остановлен при отклонении у, то люлька продолжает двигаться, пока не вернет золотник в среднее положепио и остановится при угле отклонения пропорциональном у. При остановке пасоса и прекращении подачи питания из линии 4 центрирующая пружина 6 приводит золотник в среднее положение (рис. 3.112, б). При этом золотник соединяет полости обоих цилиндров с областью слива 5 через щели я0 п пружины 3 нульустаповитсля устанавливают люльку также в положение р = 0, подготавливая насос к следующему пуску.
Управление смещением золотника и его обратная связь с люлькой могут быть электрическими. В этом случае работа насоса может регулироваться дистапциоипо и автоматически, ыапример, по командам ЭВМ.
Гидроприводы, в которых входным воздействием является электрический сигнал, преобразуемый в перемещение гидро-распределителя, называют элек. трогидравлическимй. В них вы-ходцое звено отслеживает изменение электрического сигнала, поступающего на ввепо управления. Рассмотрим простейшие системы для преобразования электрического сигнала в гидравлический.
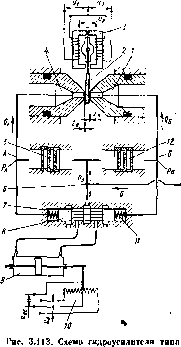
Гидроусилитель типа сопло—заслонка показаи схематически на рис. 3.113 состоит из сопел 1 и 4, которые вместе с подвижной заслонкой 2 образуют два регулируемых щелевых дросселя, и нерегулируемых дросселей 5 и 12, установ-ленных на цути подвода жидкости из точки 6, куда она подается от насоса. Работа такой дроссельпой системы, являющейся версии каскадом гидроусилителя, рассмотрена в п. 3.28. Исполнительным механизмом гидроусилителя служит гидроцилипдр У.
Первый каскад управляет смещением золотника 8, который является вторым каскадом гидроусилителя и непосредственно управляет гидроцилиндром.
Вся система пужна для того, чтобы на входе мог быть использован маломощный электрический командный сигнал от задающей электронной аппаратуры. Этот сигнал подается на обмотки миниатюрного электромеханического преобразователя S (поворотного электродвигателя) в виде разности напряжений Ux и иъ в результате чего вроисходит отклонение ааслоики 2, До ее отклонения обе дрос-
лпх
селирующие ветви А а Б имели одинаковые сопротивления и пропускали одинаковые расходы Qa и Qe- После отклонения сопротивление сопла, к которому приблизилась заслонка, увеличивается и расход через него уменьшается. Расход в другой ветви возрастает. При этом возникает неравенство давлений рл и рв в узловых точках ветвей. Эта разница давлений вызывает смещение золотпика 8 центрируемого пружинами 7 и 11, что в конечном итоге приводит в действие гидроцилиндр.
Если в такой системе оа выходе исполнительного механизма, предусмотрен датчик обратной связи 10, сигнализирующий об исполнении поданной команды напряжением Uoc, ослабляющим сигнал на входе, то она будет представлять электрогидравлическую следящую систему.
Главным преимуществом такого гидроусилителя является применение простейших квадратичных дросселей, ие чувствительных к засорениям и к изменению вязкости жидкости. Такие дроссели, имея нелинейные характеристики, позволяют при взаимодействии получить характеристики со взаимосвязью входных и выходных параметров близкой к линейной. В рассматриваемой системе, входной параметр — отклонение заслонки 3 (см. рис. 3.89, а\ а выходной — различие давлений рА и рв, смещающее золотник 8. Линейность таких взаимосвязей всегда желательна, так как упрощает применение гидроусилителя в качестве составной части сложных автоматических систем.
Уравнения пропускной способности ветвей А -а Б гидроусилителя, в которых нерегулируемый дроссель и регулируемое сопло пропускают одинаковый расход, имеют вид
<2а = Ида5д | Vpi, — рл= ficAn?/ezA |/" J- У Ра,
Об = НдгД, У^ “ Ре — j/"~ VРв,
где р,д — коэффициент расхода дросселя (см. рис. 3.88); |лс — коэффициент расхода сопла (см. рис. 3.S9, б),
Значения коэффициентов и цс для этих элементов в ветвях А и Б, вообще говоря, могут быть различны из-за различая расходов Q и смещений г, ведущего к различию в Re.
Смещения Дз заслонки по отношению к двум соплам взаимосвязаны:
гд-f2ь =2z0; za — г0±Дг; 2с = г0грДг.
Максимальное смещение гтаз: пе может превышать 2г0. Для упрощения записи введем понятия G проводимости элементов: для нерегулируемых дросселей — близкая к постоянной ве
личина, изменяющаяся только с изменением цд; для регулируемых дросселей — сопел Ge = nandcz У 2/р — переменная величина из-за переменности z и цс.
Примем выработанные практикой рекомендации для соотношений размеров и проводимостей таких гидроусилителей:
z0=ssO,ldc; Сд:
: (при Яшах)'
Решая совместно уравпевия для QA и с применением принятых обозначений и предпосылок, получаем уравнения статической характеристики гидроусилителя (предположено, что заслонка приближается к соплу 4 и открывает сопло 1у.
Ра Ч+С8в.
Р* =
Ръ '
Qi Сд Vp,
_. п* _
Ga + GcA Б GaVpo
Характеристики, построеппые по этим уравнениям показаны на рис. 3.114.
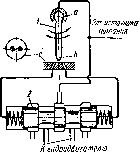
Рис. 3.115. Схема гидроусилителя типа струйная ЧруСка "
0* р*
| V- | ft | г | p*=2l \ Ра. | ||
| ?,** |
s' | ||||
|
ЧУ' | |||||
| / |
%ь | \ |
Zifa 1,6 1,2 1,0 0,8 0,4 О
Рис. 3.114. Характеристика гидроусилителя типа сопло—заслонка
График р* относительного различия давлений симметричен относительно оса, соответствующей среднему положению заслонки (гд = гв — zg). При любом соотношении взаимосвязанных смещений za и ze по графику Q* можно найти полный расход Q* = Ql + Qb через ветви гидроусилителя. При среднем положении заслонки этот расход максимален.
Рис. 3.114 показывает, что при соблюдении приведенных выше рекомендаций о размерах и проводимостях элементов дроссельной системы, гидроусилитель способен обеспечить взаимосвязь между смещением г заслонки и величиной р* относительного различия давлений, близкую к линейной.
Двустороннее воздействие струй на заслонку позволяет использовать для ее отклонения поворотные электродвигатели, расходующие весьма малую электрическую мощность.
Гидроусилитель типа струнная трубка показан на рис. 3,115. Как и система сопло—заслонка его широко применяют в качестве первого каскада электрогидравличсских следящих систем. Он состоит из поворотной трубки 1, к которой через шарнир а подведена жидкость от источника пптания. Струя из сопла b направлена на распределитель С с двумя отверстиями, соединенными с полостями управляемого элемента — обычпо золотника 2 второго каскада гидроусилителя. Последний аналогичен показанному ва ряс. 3.113 (ноз. 8) п служит для управления исполнительным гидродвигателем. Среднему положению трубки 1 соответствует среднее положение эолотиика 2. Поворот трубки вызывает его смещение и далее ведет к смещению гидродвигателя. Легкость поворота и малая инерция трубки позволяет управлять ее движением при помощи маломощных электродвигателей (электромагнитов) с большим быстродействием.
Обратная связь в таких системах обычно также электрическая, аналогична показанной на рис. 3.113.
Гидроусилители этого типа способны работать в тяжелых условиях. Они нечувствительны к загрязненности и изменению вязкости рабочей жидкости.
3.39. Чувствительность, точность и устойчивость гидроусилителей
Гидроусилители следящего типа должны воспроизводить с минимальной ошибкой перемещение выходного звена в соответствии с заданным перемещением входного.
Ошибка слежения определяется в первую очередь передаточным числом кинематической цепп обратной связи, равным для схемы, изображенной на рис. 3.111, i = т/п,
где т — длина плеча рычага 7 между точками крепленая золотника и тяги уаравлеиия; и — длина между точками крепления штока и тяги управления:.
Важный показатель качества следящих гидроусилителей — устойчивость, под которой погашается способность системы возвращаться в состояние установившегося равновесия после прекращения действия источника, нарушившего его.
Одпо пз условий обеспечения устойчивости гидравлической сло-дящей системы — жесткость со механических и гидравлических элементов. При недостаточной жесткости, в особенности ыри сочетании ее с высокой чувствительностью распределительного устройства, устойчивость системы неизбежно нарушается. Последнее можно видеть на рис. 3.116, а, на котором показана схема упругого крепления цилиндра гидроусилителя, снабженного чувствительным (с малым перекрытием) золотником. При каком-либо импульсе, вызывающем смещение выходного звена гидроусилителя, при неподвижном входе цилиндр из-за наличия упругого звена (упругостью s) сместится в сторону действия импульса и поверпет относительно точки b рычаг а обратной связи, сместив при этом золотник. Очевидно, при определенных значениях упругости s и интенсивности импульса золотиик сможет сместиться настолько, что рабочая жидкость поступит в соответствующую полость гидродвигателя и приведет в движение его поршень, в результате чего направление дни* жепия рычага а изменится. При этом потенциальная энергия упругого звена будет способствовать переходу золотпика через равновесное положение, в результате цилипдр переместится в обратном направлении и далее процесс колебаний автоматизируется.
В реальных условиях па устойчивость гидроусилителя влияют и другие факторы, к которым относятся упругость жидкости в полостях системы и трубопроводов присутствие в я>идкости ыераство-ревного воздуха, люфты в механических сочленениях, колебания гидродинамических сил в золотниковом распределителе.
о — гидроусилителя с упругим звеном; б — гидравлического домифсра
Наиболее простым способом повышепия устойчивости системы является увеличение перекрытия окон (см. рис. 3.66) и уменьшение передаточного числа i = min. Однако этот способ снижает точность работы гидроусилителя.
Надежным способом гашения колебаний служит гидравлическое демпфировапие, с помощью которого кинетическая энергия колебаний рассеивается в виде тепла. Конструктивно демпфер представляет собой цилиндр, поршень 3 которого (рис. 3.116, б) связан с золотником 1 распределителя. В поршне выполнено дроссельное отверстие 2. При перемещениях поршня жидкость вытесняется через отверстие и радиальную щель между поршнем и цилиндром из одной полости цилиндра в другую. Сечение дроссельного отверстия 2 выбирают таким, чтобы ого сопротивление пе увеличивало чрезмерно усилий при рабочих перемещениях золотпика, в режиме управления, но чтобы при высокочастотных вибрационных перемещениях золотника создавалось сопротивление, способное поглотить энергию, возбуждающую колебания.
